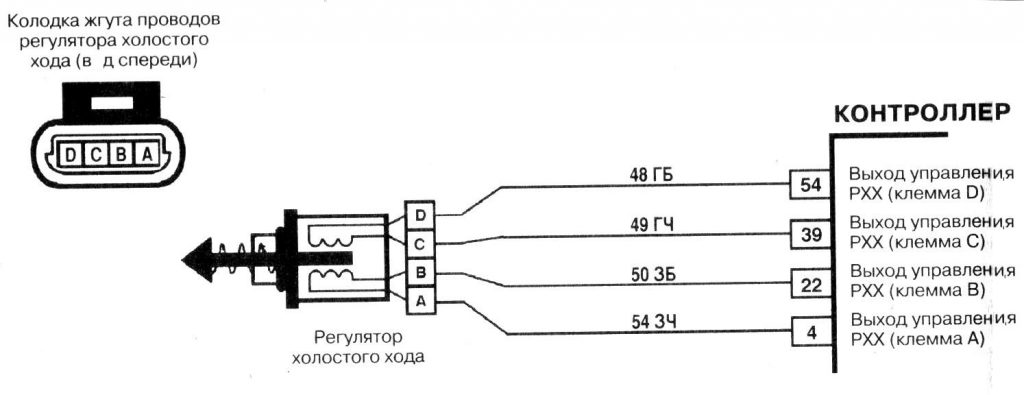
На моїй машині був поламаний датчика масової витрати повітря (скор. ДМРВ), тому я їздив раніше без нього. І на бензині і на газу метан машина якось їздила. Але коли я встановив пропан – з’явилися дуже перевищенні оберти на холостому ходу, до 2500 наприклад.
Дослідження встановило, що мозок авто дуже сильно відкривав канал для подачі повітря холостого ходу за допомогою регулятора холостого ходу (скор. РХХ). Це значення становило 70-80 кроків.
При цьому збільшувалося розрідження і газовий редуктор видавав більше газу, внаслідок чого були підвищені оберти.
Регулювання настройок редуктора призводили до єдиного результату – або 2000 обертів, або двигун заглохав.
При значенні кроків РХХ в районі 20 – були припустимі оберти двигуна – 950-1000. Тому я задумав “перехопити” управління РХХ, я хотів встановлювати його на 20 кроків при переході на газ, а на бензині мозок авто управляв ним.
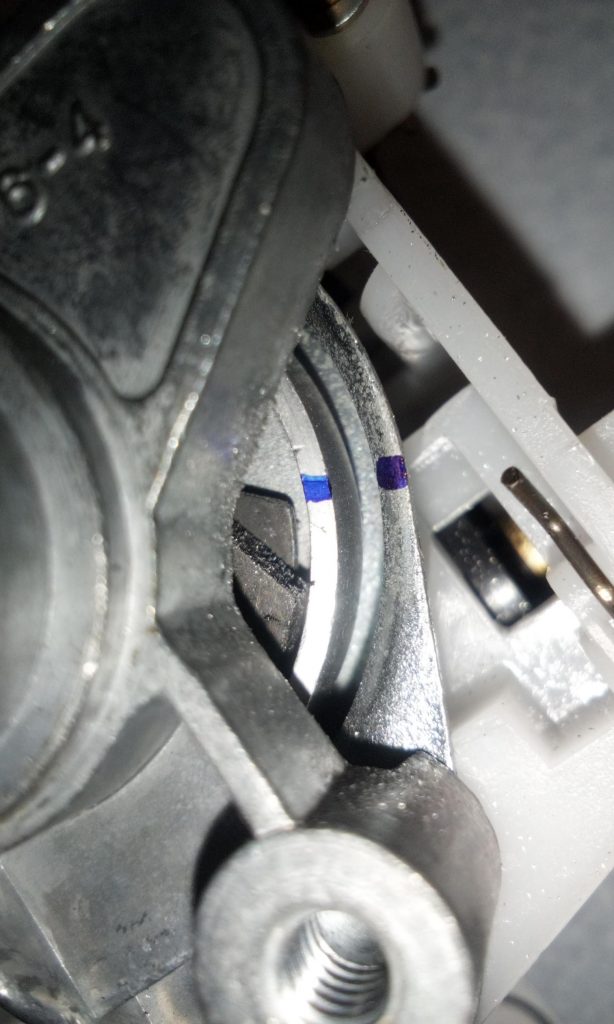
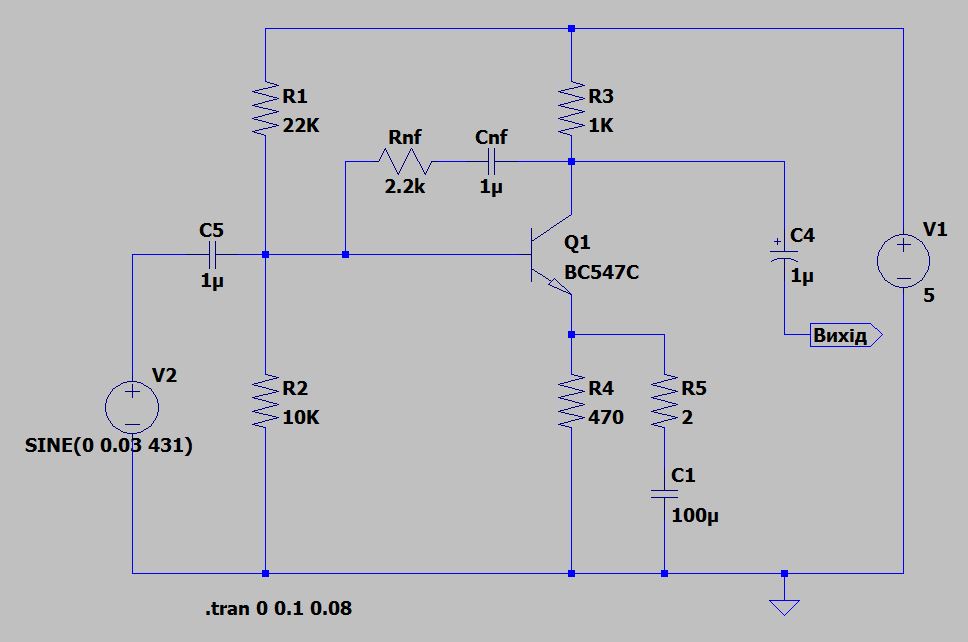
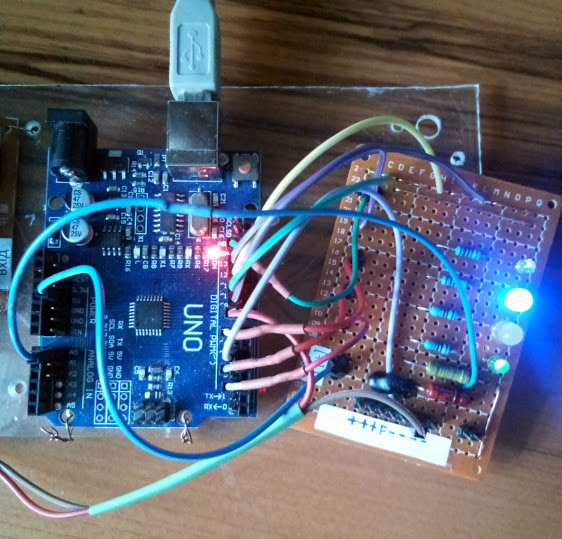
Для цього були проведені значні дослідження із застосуванням мікроконтроллера ATmega8, а також комп’ютерної техніки.
Відмінності від карбюраторного двигуна.
Справа в тому, що ГБО-2 – це є газовий карбюратор. Оберти двигуна на карбюраторному двигуні виставляються двома факторми:
- Розрідженням у впускному колекторі (управляється положенням дросельної заслонки правою ногою)
- Кутом випередження запалювання, який залежить напряму від обертів двигуна.
А от інжектор управляє і розрідженням і кутом як йому заманеться. Тому були проведені певні тести, які показали, що дуже часто мозок авто управляє оборотами за допомогою кута випередження іскри.
В результаті перехоплення управління РХХ нічого б не дало, і можливо спочатку авто мало б прийнятні оберти холостого ходу, а пізніше після “самонавчання” вони б ставали перевищені. Тому даний проекто я похоронив.
Для вирішення проблеми я просто купив аналог ДМРВ для даної моделі авто і встановив його. У результаті все працює, лінк на статтю про це
Також хочу сказати, що я побоююсь недовговічності ДМРВ, враховуючи його високу ціну (так званий оригінал 3000 грн, капія-заміна 800 грн), тому задумував цей проект.
Деякі результати проведених наукових досліджень для цього проекту
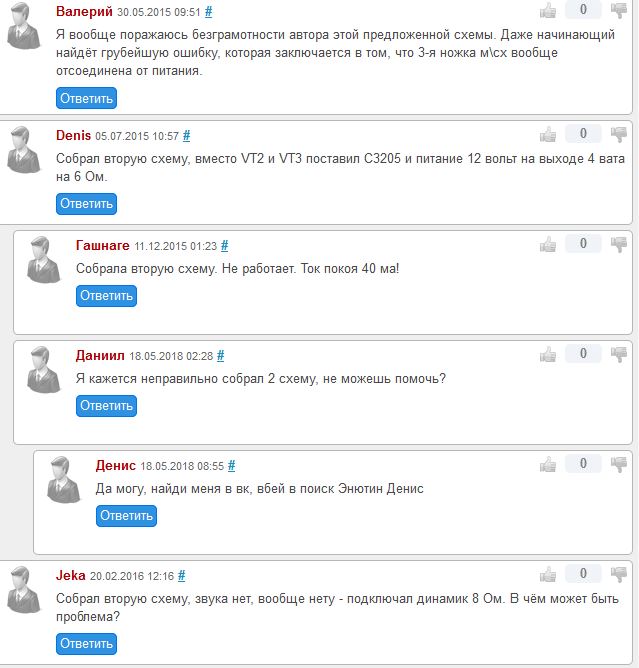
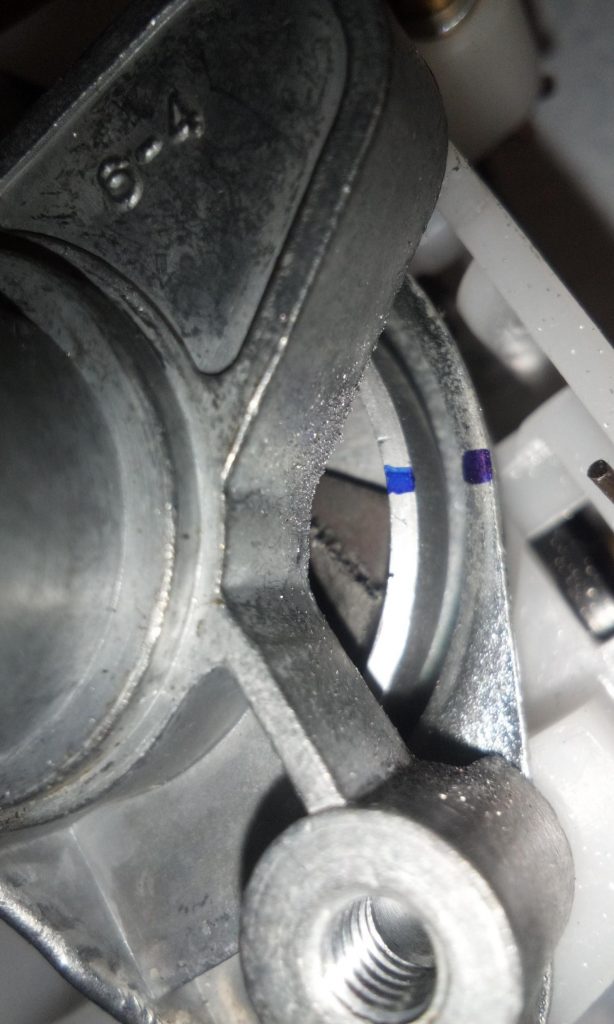
Для початку перехоплення я підключився до проводів управління РХХ. Спочатку ненароком їх замкнув, на що мозок авто видав помилку (нічого не згоріло). Мозок посилає деякі сигнали для руху крокового двигуна в ту чи іншу сторону. Сигнали мають певний період в часі.
Несподіванкою виявилося те, що невідомо як мозок авто знаходить нульову крапку в кроках двигуна РХХ. Перед цим я читав на форумах в інтернеті, що при увімкненні запалювання мозок повністю закриває канал, висовуючи шток РХХ на максимум в упор – це і є нульова позиція кроків. Потім відводить шток на 20 кроків, наприклад.
Мій же мозок Bosch M7.9.7, наче запам’ятовує позицію РХХ перед тим як я виключив запалювання. Можливо якщо зняти акумуляторну клему, то мозок би шукав “нуль”.
Чому треба шукати нуль? Наприклад я встановлював новий РХХ замість старого. Якщо у нових виставлено 20 кроків, а старий а зняв з виставленими 40 кроками – то як система запрацює справно?
Це все ще загадка для мене.
Для дослідження сигналів я використовував оптопару з сучасних блоків живлення (напр. до телефонів). Оптопара давала сигнал на мікроконтроллер, який зчитував момент зміни і записував час в мілісекундах в масив. Ось приклад результатів:
80 кроків після запуску (скоріш всього він не шукає 0)
A = x B = Y
mBan > fval: 1
86,
106,
114,
121,
130,
138,
145,
154,
162
ввів з 80 до 90 кроків
mBan > fval: 1
22
12699
12707
12714
12723
12731
ввів з 90 на 80
mBan > fval: 1
9878
9888
9898
9908
9918
ввів з 82 до 92
mBan > fval: 1
3120
3128
3136
3143
3152
було 82 увів 0
mBan > fval: 1
9346
9355
9366
9375
9385
9396
9406
9416
9426
9436
9447
9457
9467
9476
9487
9496
9506
9517
9527
9537
9547
9557
9567
9576
9587
9596
9606
9618
9628
9638
9648
9658
9668
9678
9688
9697
9707
9718
9728
9738
9748
Коли позиція РХХ фіксована, програма постійно видає струм на РХХ, тому я бачу 22 мілісекунди
було 82 увів 142
mBan > fval: 1
6385
6393
6401
6408
6417
6425
6432
6441
6449
6457
6465
6472
6481
6489
6496
6505
6513
6521
6530
6538
6545
6554
6562
6570
6578
6585
6594
6602
6609
6618
було 83 ввів 86
mBan > fval: 1
7302
7310
Менше 3х кроків бачу тільки один сигнал
Певні кроки тримаються постійно підключеним струмом на обмотку, наприклад 84
92, 93 є струм на обмотку
94 95 нема
96 97 є
0 1 є
2 3 нема
4 5 є
6 7 нема
-===-=-=-=-=-=-=-===-=--=-=-=---=-
A = Y B = X
Було десь 6, стало 83 приблизно, це просто для інтервалів
mBan > fval: 1
86
109
118
126
133
142
151
158
167
175
182
191
199
207
215
222
231
239
246
255
263
270
279
287
295
304
312
319
328
336
344
352
359
368
376
383
392
400
407
416
0 1 нема струму
2 3 є
і так далі
82 ввів 92
mBan > fval: 1
22
8430
8437
8446
8454
8461
86 ввів 96
mBan > fval: 1
22
6329
6336
6345
6353
6361
82 увів 0
mBan > fval: 1
22
5164
5174
5184
5194
5204
5214
5223
5233
5244
5253
5264
5274
5285
5295
5305
5315
5324
5335
5344
5354
5365
5375
5385
5395
5405
5415
5424
5435
5445
5455
5466
5476
5486
5496
5506
5516
5526
5536
5545
5555
5566
90 ввів 80
mBan > fval: 1
22
5290
5301
5310
5320
5331
Ноутбуком виставляю 0 і вимикаю запалювання. потім увімкну
було 87 кроків
mBan > fval: 1
110
118
126
133
142
151
158
167
175
182
191
199
207
215
222
231
239
246
255
263
270
279
288
295
304
312
319
328
336
344
352
359
368
376
383
392
400
408
416
425
433
441
448
-===-=-=-=-=-=-=-===-=--=-=-=---=-
A = X
Ноутбуком виставляю 0 і вимикаю запалювання. потім увімкну
було 87 кроків
mBan > fval: 1
86
109
118
126
133
143
151
158
167
175
183
191
198
207
215
222
231
239
246
255
263
271
279
286
295
304
312
320
328
335
344
352
359
368
376
384
392
399
408
416
423
432
440
448
457Для отримання графіків сигналів, я модифікував результати досліджень за допомогою не хитрих програм і згодував ці дані певним сайтам, які будують математичні графіки. Ось результати:
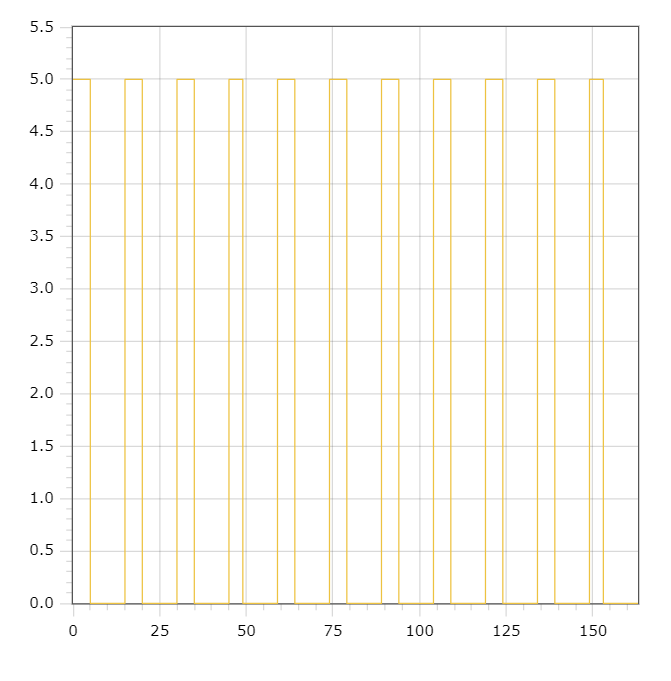
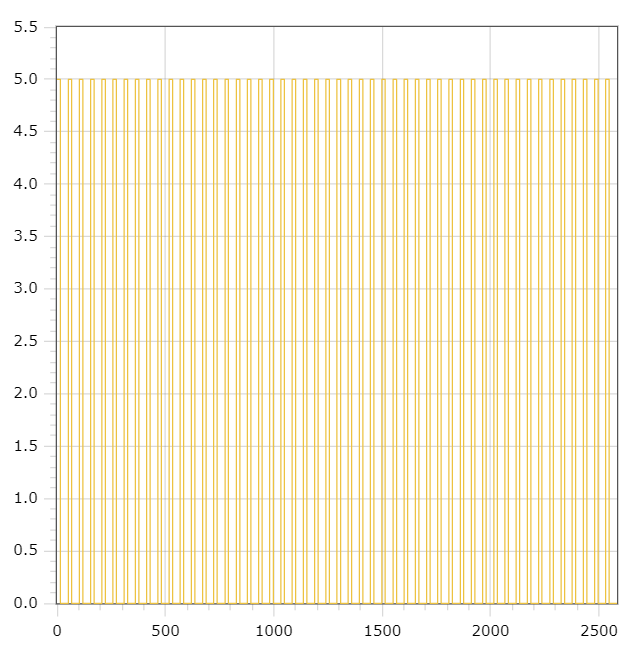
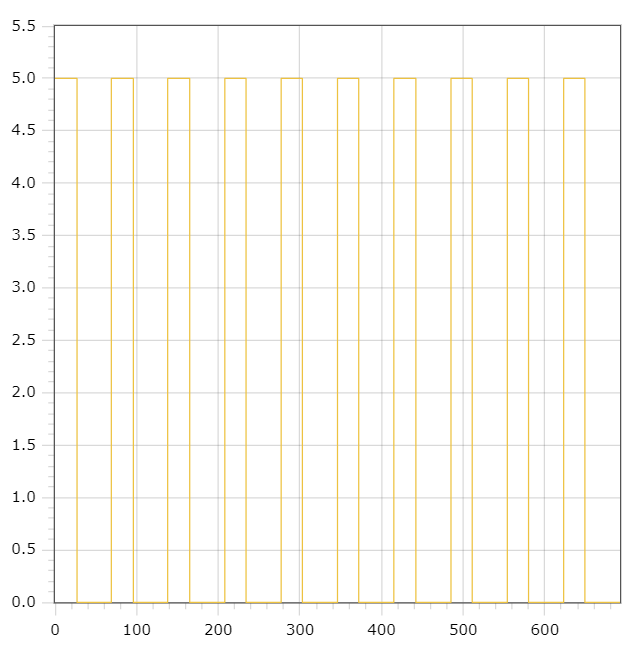
Ось такі маємо результати. Вони не повні і не мають закінченого висновку, тому що проект було закопано в могилу. Але добре те, що вдалося зчитати імпульси за допомогою контроллера – а це можна використати для іншого важливого проекту – зчитування імпульсів від інфрачервоних пультів ДУ для їх клонування. Це важливо для мене, тому що в мене є акустична система 5.1 BBK з пультом RC-05. Ніяких органів управління, крім пульта – немає. Без цього маленького пульта вся система не працюватиме взагалі.